About Me
Hi there! I am an Assistant Professor in Mechanical and Automation Engineering (MAE) at The Chinese University of Hong Kong (CUHK). I obtained my Ph.D. degree in Mechanical Engineering (Controls and Robotics) at University of California, Berkeley in 2025. I worked with Prof. Koushil Sreenath.
during my Ph.D. study. Before that, I spent a wonderful year doing research with Prof. Ralph Hollis at Carnegie Mellon University.
I obtained my B.Eng. degree of Mechatronics at Zhejiang University in 2019.
My goal is to create safe, intelligent, and agile legged robots for better human companions.
My current research is primarily centered on tackling the control, planning, and learning of legged robots. I am also interested to expand the boundaries of legged robots beyond just locomotion to accomplish more complex tasks like whole-body manipulation.
I am always happy to chat or collaborate with people with different backgrounds. If you are interested in my work, please feel free to reach out!
- Google Scholar: CLICK HERE
- Linkedin: CLICK HERE
- Twitter: CLICK HERE
- Email: CLICK HERE
Research Interests
I am interested in creating new generations of dynamic robots, such as humanoids and other bio-inspired robots, to make them more intelligent, agile, robust, and safe, and ultimately, useful. My research lies in the combination of control, optimization, motion planning, reinforcement learning, imitation learning, and multi-agent interaction.
Research Highlights
My work has enabled a bipedal robot Cassie to perform robust, agile, and highly dynamic maneuvers such as walking, jumping, and running, and to safely and autonomously navigate in unknown and cluttered environments. I have also expanded the capacities of quadrupedal robots beyond locomotion by performing various loco-manipulation tasks, such as functioning as guide dogs, soccer ball shooters and goalkeepers, collaborative agents, and more.


Honors and Awards
- Selected as one of the Rising Stars in Mechanical Engineering (in the US) in 2023
- Selected as one of 30 cohort of RSS Pioneers (cross the globe) in 2023
- William S. Floyd, Jr. Graduate Student Fellowship at UC Berkeley, 2022
- Best RoboCup Paper Finalist in IROS 2022
- Graduate Division Block Grant Award in Mechanical Engineering at UC Berkeley, 2021
- Best Service Robot Paper Finalist in ICRA 2021
- Best Entertainment and Amusement Paper Finalist in IROS 2020
- IROS Student and Developing Countries (SDC) Travel Award, 2019
- Best Undergraduate Thesis Award at Zhejiang University, 2019
Invited Talks
Can We Bridge Model-based Control and Model-free RL on Legged Robots?09/2022, GRASP SFI, University of Pennsylvania09/2022, Mila – Quebec AI Institute 11/2022, Beijing Academy of Artificial Intelligence (BAAI) |
Towards Safe, Robust, and Dynamic Legged Robots and Beyond07/2023, Southern University of Science and Technology (SUSTech)08/2023, Institute for Interdisciplinary Information Sciences (IIIS), Tsinghua University 08/2023, Huzhou Research Institute, Zhejiang University 02/2024, Seminar in the group of Prof. Guanya Shi, Carnegie Mellon University 03/2024, Seminar in the group of Prof. Ding Zhao, Carnegie Mellon University 04/2024, Berkeley Control Seminar, UC Berkeley 09/2024, AI Institute, Shanghai Jiao Tong University 10/2024, Seminar in the group of Prof. Sophia Shao, UC Berkeley 12/2024, Humanoid Intelligence Seminar, UC Berkeley |
Towards General-Purpose Robots from the Perspectives of Legged Robots06/2024, Guest Lecture in Deep Learning Course at IIIS, Tsinghua University |
Publications
*Equal Contribution, †Project Lead, ⟊Equal Advising Highlights
Peer-Reviewed Journals
|
Reinforcement Learning for Versatile, Dynamic, and Robust Bipedal Locomotion Control
Z. Li, X. B. Peng, P. Abbeel, S. Levine, G. Berseth, K. Sreenath International Journal of Robotics Research (IJRR), 2024 Paper / Video / Media: MIT Technology Review A general RL framework for bipedal robot to perform various locomotion skills from standing to walking, jumping, and running. |
 |
Autonomous Navigation of Bipedal Robots in Height-Constrained Environments
Z. Li, J. Zeng, S. Chen and K. Sreenath International Journal of Robotics Research (IJRR), 2023 Paper / Video / Media: Video Friday A bipedal robot now can autonomously and safely navigate unknown and congested environments. |
 |
Traversability-Aware Legged Navigation by Learning from Real-World Visual Data
H. Zhang, Z. Li†, X. Zeng, L. Smith, K. Stachowicz, D. Shah, L. Yue, Z. Song, W. Xia, S. Levine, K. Sreenath, Y. H. Liu IEEE Transactions on Robotics (T-RO), 2025 Paper / Video Learn from real-world RGBD visual data to navigate with lower traversability cost for quadrupedal robots. |
 |
Collaborative Navigation and Manipulation of a Cable-towed Load by Multiple Quadrupedal Robots
C. Yang*, G. N. Sue*, Z. Li*, L. Yang, H. Shen, Y. Chi, A. Rai, J. Zeng, K. Sreenath IEEE Robotics and Automation Letters (RA-L), 2022 Paper / Video / Media: Video Friday A legged robot team that can tow a heavy load by cables. |
Journals in Review
|
Decentralized Navigation of a Cable-Towed Load using Quadrupedal Robot Team via MARL
W. T. Chen*, M. Nguyen*, Z. Li*, G. N. Sue, K. Sreenath In Submission to IEEE Transactions on Robotics (T-RO), 2024 Paper / Video A decentralized collaborative quadupedal robots team for load-towing tasks by MARL. |
 |
Interactive Navigation with Adaptive Non-prehensile Mobile Manipulation
C. Dai*, X. Liu*, K. Sreenath, Z. Li†, R. Hollis In Submission to IEEE Robotics and Automation Letters (RA-L), 2025 Paper / Website An adpative control framework for interactive navigation tasks. |
Peer-Reviewed Conference Papers
 |
Toward Real-World Cooperative and Competitive Soccer with Quadrupedal Robot Teams
Z. Su*, Y. Gao*, E. Lukas*, Y. Li, J. Cai, F. Tulbah, F. Gao, C. Yu, Z. Li⟊, Y. Wu⟊, K. Sreenath⟊ Conference on Robot Learning (CoRL), 2025 Paper / Video Soccer team play in real! |
 |
Demonstrating Berkeley Humanoid Lite: An Open-source, Accessible, and Customizable 3D-printed Humanoid Robot
Y. Chi, Q. Liao, J. Long, X. Huang, S. Shao, B. Nikolic, Z. Li†, K. Sreenath Robotics: Science and System, 2025 Paper / Website A fully open-source 3D-printed humanoid robot! |
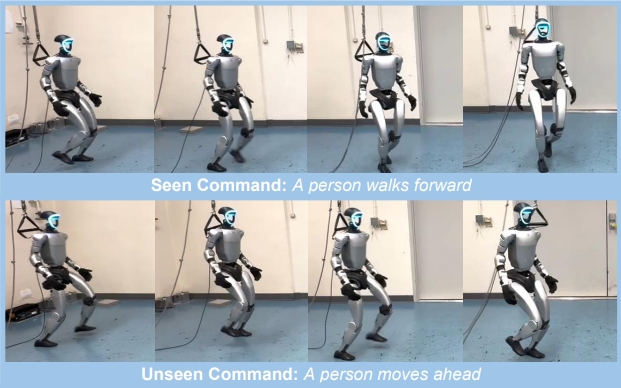 |
LangWBC: Language-directed Humanoid Whole-Body Control via End-to-end Learning
Y. Shao, X. Huang, B. Zhang, Q. Liao, Y. Gao, Y. Chi, Z. Li, S. Shao, K. Sreenath Robotics: Science and System, 2025 Paper / Video Text-To-Humanoid-Control |
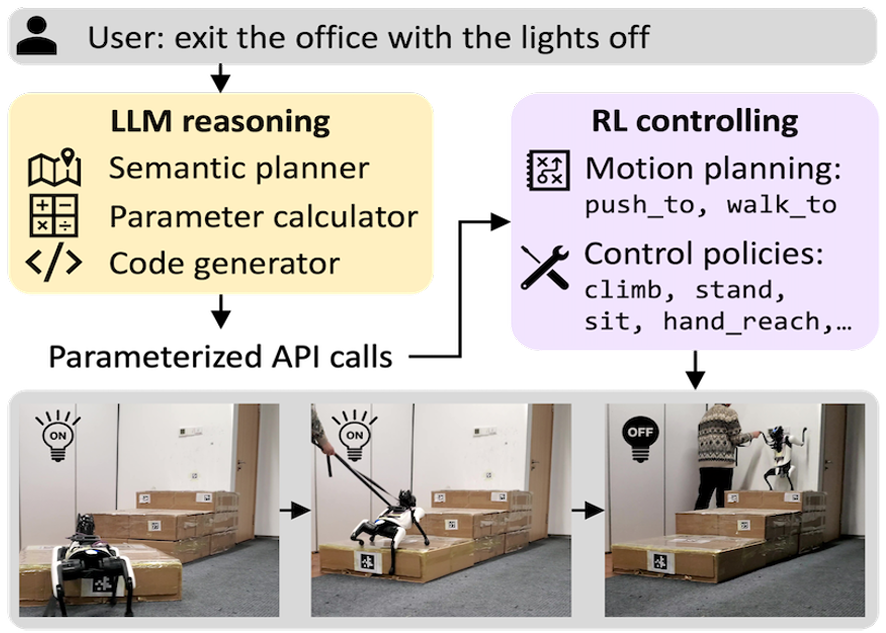 |
Long-horizon Locomotion and Manipulation on a Quadrupedal Robot with Large Language Models
Y. Ouyang, J. Li, Y. Li, Z. Li†, C. Yu, K. Sreenath, Y. Wu International Conference on Intelligent Robots and Systems (IROS), 2025 Paper LLM agents for long-horizon task and motion planning for loco-manipulation tasks using quadrupeds |
 |
Learning Smooth Humanoid Locomotion through Lipschitz-Constrained Policies
Z. Chen*, X. He*, Y. J. Wang*, Q. Liao, Y. Ze, Z. Li, S. Sastry, J. Wu, K. Sreenath, S. Gupta, X. B. Peng International Conference on Intelligent Robots and Systems (IROS), 2024 Paper / Website Using Lipschitz constraint to have smooth RL policy. |
 |
Berkeley Humanoid: A Research Platform for Learning-based Control
Q. Liao, B. Zhang, X. Huang, X. Huang, Z. Li, K. Sreenath International Conference on Robotics and Automation (ICRA), 2025 Paper / Website / Media: IEEE Specturm An in-house-built and cool humanoid (bipedal) robot. |
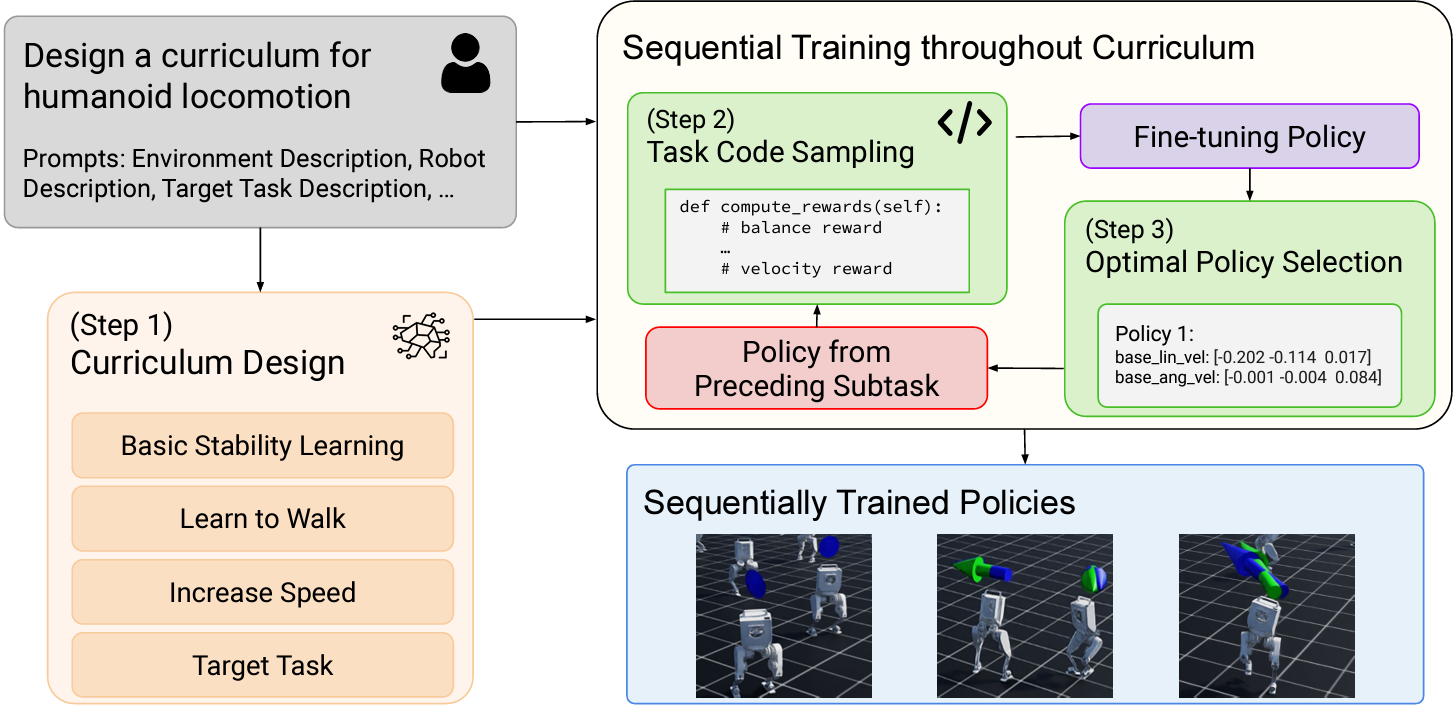 |
CurricuLLM: Automatic Task Curricula Design for Learning Complex Robot Skills using Large Language Models
K. Ryu, Q. Liao, Z. Li, K. Sreenath, N. Mehr International Conference on Robotics and Automation (ICRA), 2025 Paper / Code LLM agents for curricula design for RL. |
 |
DiffuseLoco: Real-Time Legged Locomotion Control with Diffusion from Offline Datasets
X. Huang*, Y. Chi*, R. Wang*, Z. Li†, X. B. Peng, S. Shao, B. Nikolic, K. Sreenath Conference on Robot Learning (CoRL), 2024 Paper / Website Diffusing multimodal legged locomotion skills purely from offline datasets with a 6.8M transformer DDPM (YES it runs onboard at 50Hz!). |
 |
Learning Visual Quadrupedal Loco-Manipulation from Demonstrations
Z. He, K. Lei, Y. Ze, K. Sreenath, Z. Li, H. Xu International Conference on Intelligent Robots and Systems (IROS), 2024 Paper / Website Imitation learning for end-effector planning + reinforcement learning whole-body contol for loco-manipulation tasks. |
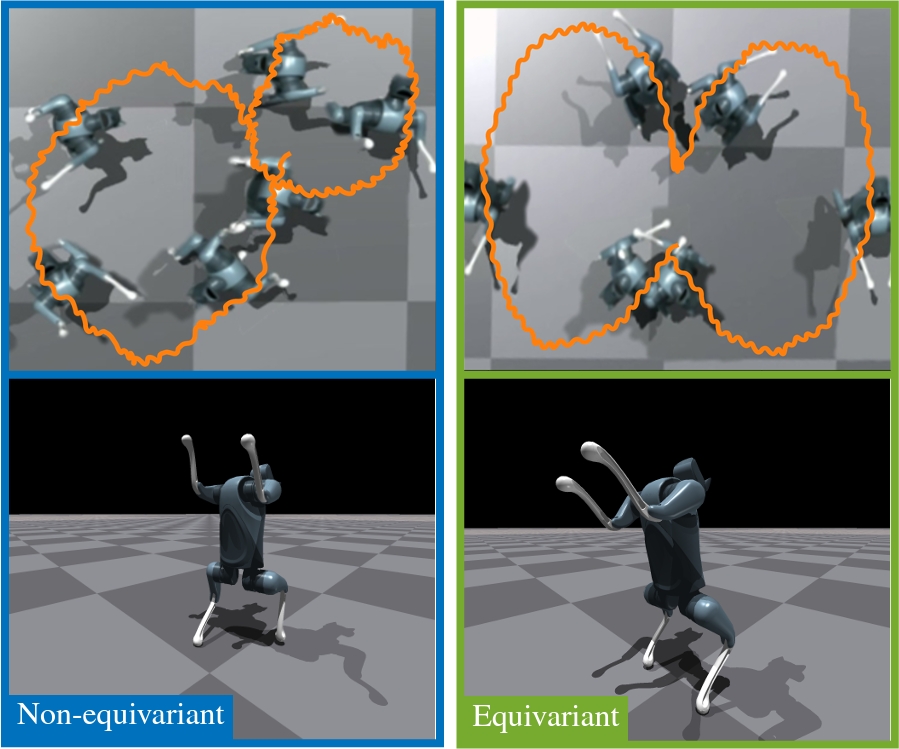 |
Leveraging Symmetry in RL-based Legged Locomotion Control
Z. Su*, X. Huang*, D. Ordoñez-Apraez, Y. Li, Z. Li, Q. Liao, G. Turrisi, M. Pontil, C. Semini, Y. Wu, K. Sreenath International Conference on Intelligent Robots and Systems (IROS), 2024 Paper / Website The efficacy of two approaches to incorporate symmetry in RL for locomotion control. |
 |
HiLMa-Res: A General Hierarchical Framework via Residual RL for Combining Quadrupedal Locomotion and Manipulation
X. Huang, Q. Liao, Y. Ni, Z. Li†, L. Smith, S. Levine, X. B. Peng, K. Sreenath International Conference on Intelligent Robots and Systems (IROS), 2024 Paper / Video A hierarchical RL framework to tackle various loco-manipulation tasks while performing continuous quadrupedal locomotion skills. |
 |
Robust and Versatile Bipedal Jumping Control through Reinforcement Learning
Z. Li, X. B. Peng, P. Abbeel, S. Levine, G. Berseth, K. Sreenath Robotics: Science and Systems (RSS), 2023 Paper / Video / Media: Video Friday A bipedal robot learns to perform various aggressive jumping maneuvers. |
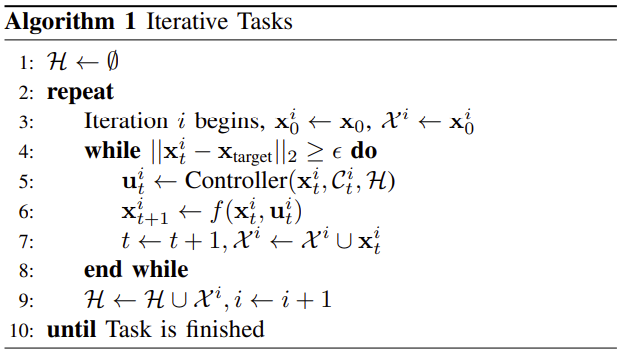 |
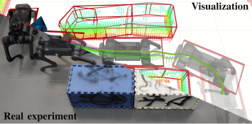
i2LQR: Iterative LQR for Iterative Tasks in Dynamic Environments
Y. Zeng*, S. He*, H. H. Nguyen, Z. Li, K. Sreenath, J. Zeng Conference on Decision and Control (CDC), 2023 Paper Iterative LQR for iterative tasks, analogous to learning MPC :) |
 |
Walking in Narrow Spaces: Safety-critical Locomotion Control for Quadrupedal Robots with Duality-based Optimization
Q. Liao, Z. Li†, A. Thirugnanam, J. Zeng, and K. Sreenath International Conference on Intelligent Robots and Systems (IROS), 2023 Paper / Video / Code A safety-critical legged locomotion controller to travel through narrow spaces. |
 |
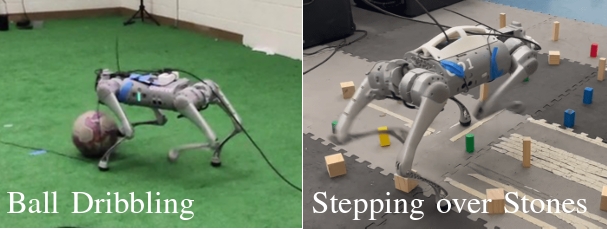
Creating a Dynamic Quadrupedal Robotic Goalkeeper with Reinforcement Learning
X. Huang*, Z. Li*, Y. Xiang, Y. Ni, Y. Chi, Y. Li, L. Yang, X. B. Peng, K. Sreenath International Conference on Intelligent Robots and Systems (IROS), 2023 Paper / Video / Media: IEEE Specturm • Tech Xplore • TechCrunch • DailyMail • DailyMail A agile quadrupedal goalkeeper that can intercept fast-moving ball. |
 |
GenLoco: Generalized Locomotion Controllers for Quadrupedal Robots
G. Feng*, H. Zhang*, Z. Li†, X. B. Peng†, B. Basireddy, L. Yue, Z. Song, L. Yang, Y. Liu, K. Sreenath, S. Levine Conference on Robot Learning (CoRL), 2022 Paper / Video / Code An opensourced generalized locomotion controller for a vast number of quadrupedal robots. |
 |
Hierarchical Reinforcement Learning for Precise Soccer Shooting Skills using Quadrupedal Robots
Y. Ji*, Z. Li*, Y. Sun, X. B. Peng, S. Levine, G. Berseth, K. Sreenath International Conference on Intelligent Robots and Systems (IROS), 2022 Best RoboCup Paper Finalist, IROS 2022 Paper / Video / Media: Video Friday • Tech Xplore A quadrupedal robot that can precisely shoot a soft ball to the given target. |
 |
Adapting Rapid Motor Adaptation for Bipedal Robots
A. Kumar*, Z. Li*, J. Zeng, D. Pathak, K. Sreenath, J. Malik International Conference on Intelligent Robots and Systems (IROS), 2022 Paper / Video An adaptive bipedal locomotion controller by RL. |
 |
Teaching Robots to Span the Space of Functional Expressive Motion
A. Sripathy, A. Bobu, Z. Li, K. Sreenath, D. S. Brown, A. D. Dragan International Conference on Intelligent Robots and Systems (IROS), 2022 Paper / Video Humans can teach robot how to behave with emotions! |
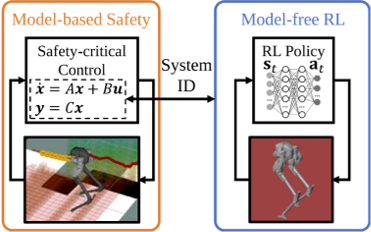 |
Bridging Model-based Safety and Model-free Reinforcement Learning through System Identification of Low Dimensional Linear Models
Z. Li, J. Zeng, A. Thirugnanam, K. Sreenath Robotics: Science and Systems (RSS), 2022 Paper / Video / Seminar A bipedal robot controlled by its RL policy is a linear system! |
 |
Bayesian Optimization Meets Hybrid Zero Dynamics: Safe Parameter Learning for Bipedal Locomotion Control
L. Yang*, Z. Li*, J. Zeng, K. Sreenath International Conference on Robotics and Automation (ICRA), 2022 Paper / Video Auto-tuning a HZD-based bipedal locomotion controller by Bayesian Optimization. |
 |
Autonomous navigation for quadrupedal robots with optimized jumping through constrained obstacles
S. Gilroy*, D. Lau*, L. Yang*, E. Izaguirre, K. Biermayer, A. Xiao, M. Sun, A. Agrawal, J. Zeng, Z. Li†, and K. Sreenath Conference on Automation Science and Engineering (CASE), 2021 Paper / Video / Media: Video Friday Quadrupedal robots can traverse more complex environments by leveraging a big jump. |
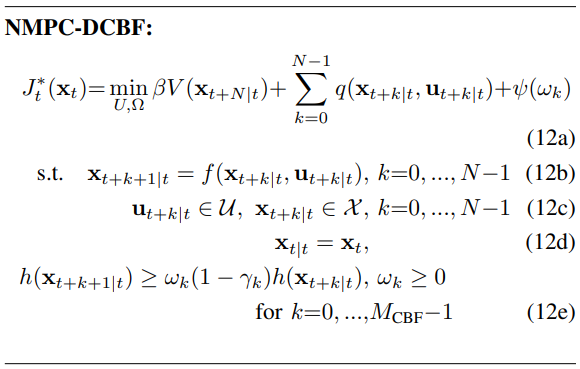 |
Enhancing Feasibility and Safety of Nonlinear Model Predictive Control with Discrete-Time Control Barrier Functions
J. Zeng*, Z. Li*, and K. Sreenath Conference on Decision and Control (CDC), 2021 Paper Incorporating Control Barrier Functions (CBFs) with Model Predictive Control (MPC). |
 |
Reinforcement Learning for Robust Parameterized Locomotion Control of Bipedal Robots
Z. Li, X. Cheng, X. Peng, P. Abbeel, S. Levine, G. Berseth and K. Sreenath International Conference on Robotics and Automation (ICRA), 2021 Paper / Video / Seminar / Media: MIT Technology Review • Tech Xplore • Inverse • MathWorks • heise (German) • DeepTech (Chinese) A bipedal robot learns to walk, turn, and squat, with significant robustness. |
 |
Robotic Guide Dog: Leading a Human with Leash-Guided Hybrid Physical Interaction
A. Xiao*, W. Tong*, L. Yang*, J. Zeng, Z. Li†, and K. Sreenath International Conference on Robotics and Automation (ICRA), 2021 Best Service Robot Paper Finalist, ICRA 2021 Paper / Video / Seminar / Media: New Scientist • Daily Mail • Tech Xplore • Daily Californian • Independent • Futurism • China Daily • DeepTech (Chinese) Quadrupedal robots can serve as guide dogs! |
 |
Safety-Critical Control with Optimal-decay Control Barrier Functions with Guaranteed Point-wise Feasibility
J. Zeng, B. Zhang, Z. Li, and K. Sreenath American Control Conference (ACC), 2021 Paper How can we ensure feasibility using Control Barrier Functions (CBFs) with bounded inputs? |
 |
Animated Cassie: A Dynamic Relatable Robotic Character
Z. Li, C. Cummings and K. Sreenath International Conference on Intelligent Robots and Systems (IROS), 2020 Best Entertainment and Amusement Paper Finalist, IROS 2020 Paper / Video / Seminar / Media: Video Friday A bipedal robot can behave emotively to be a better human companion! |
 |
Toward A Ballbot for Physically Leading People: A Human-Centered Approach
Z. Li, and R. Hollis International Conference on Intelligent Robots and Systems (IROS), 2019 Paper / Video / Media: Video Friday A ballbot that can lead a blind-folded person to navigate environments. This is how my story begins. |
Teaching
| UC Berkeley | [DEWA]: Optimization & Machine Learning with Applications to Energy Systems | Graudate Level | Class Size:~30 | 2020-2024 |
| UC Berkeley | [E7]: Introduction to Computer Programming for Scientists and Engineers | Undergraudate Level | Class Size:~200 | Fall 2020 |
| Zhejiang University | Voluntary teacher in an underrepresented primary school | K-12 | Class Size:~160 | Part time in 2014-2015 |
Academic Services
- Journal Reviewer:
The International Journal of Robotics Research (IJRR), Transactions on Robotics (T-RO), Transactions on Mechatronics (T-Mech), Transactions on Pattern Analysis and Machine Intelligence (TPAMI), Robotics and Automation Letters (RA-L), Robotics & Automation Magazine (RAM), Transactions on Cognitive and Developmental Systems (TCDS), Frontiers in Neurorobotics, Transactions on Industrial Electronics, Journal of Zhejiang University (JZUSA). - Conference Reviewer:
Robotics: Science and Systems (RSS), International Conference on Robotics and Automation (ICRA), International Conference on Intelligent Robots and Systems (IROS), International Conference on Humanoid Robots (Humanoids), International Conference on Automation Science and Engineering (CASE), The Conference on Robot Learning (CoRL), Conference on Decision and Control (CDC), Control Conference Africa (CCA).